RWTH Aachen (IRT, VKA)
Rapid prototyping and implementation of nonlinear model predictive controllers for a two-stage turbocharged gasoline engine
The team from the Institute of Automatic Control and the Institute for Combustion Engines at RWTH Aachen University used FORCESPRO to rapidly prototype different Nonlinear Model Predictive Controllers (NMPC) for two-stage turbocharged gasoline engines.
Turbocharging is a state of the art measure to increase the power output of an internal combustion engine. With the proliferation of this technology car manufacturers can downsize their engines and reduce the displacement volume without sacrificing power and thereby provide more fuel efficient cars. However, designing the turbocharger always leads to a compromise between fast transient response and high specific power.
Two-stage turbocharging concepts represent one promising solution to solve this conflict of objectives. A small high pressure turbocharger enables high torque at low engine speeds and a fast boost pressure build up, whereas the large low pressure stage provides high maximum power with good efficiency.
You can also download a PDF version of this success story.
Summary
The Challenge
Implement nonlinear model predictive controller on prototyping hardware. Controller parameters should be tuned during plant operation. Turbocharger speed constraints have to be satisfied.
The Solution
FORCESPRO generated a controller for the target platform such that tuning parameters can be changed online during test drives for rapid prototyping and constraints are taken into account explicitly.
The Results
- Real-time computation times achieved on prototyping hardware
- Rapid prototyping enables very fast determination of optimal tuning parameters
- Significant performance improvement over classical PID controller
- All constraints are satisfied by design
Control concept
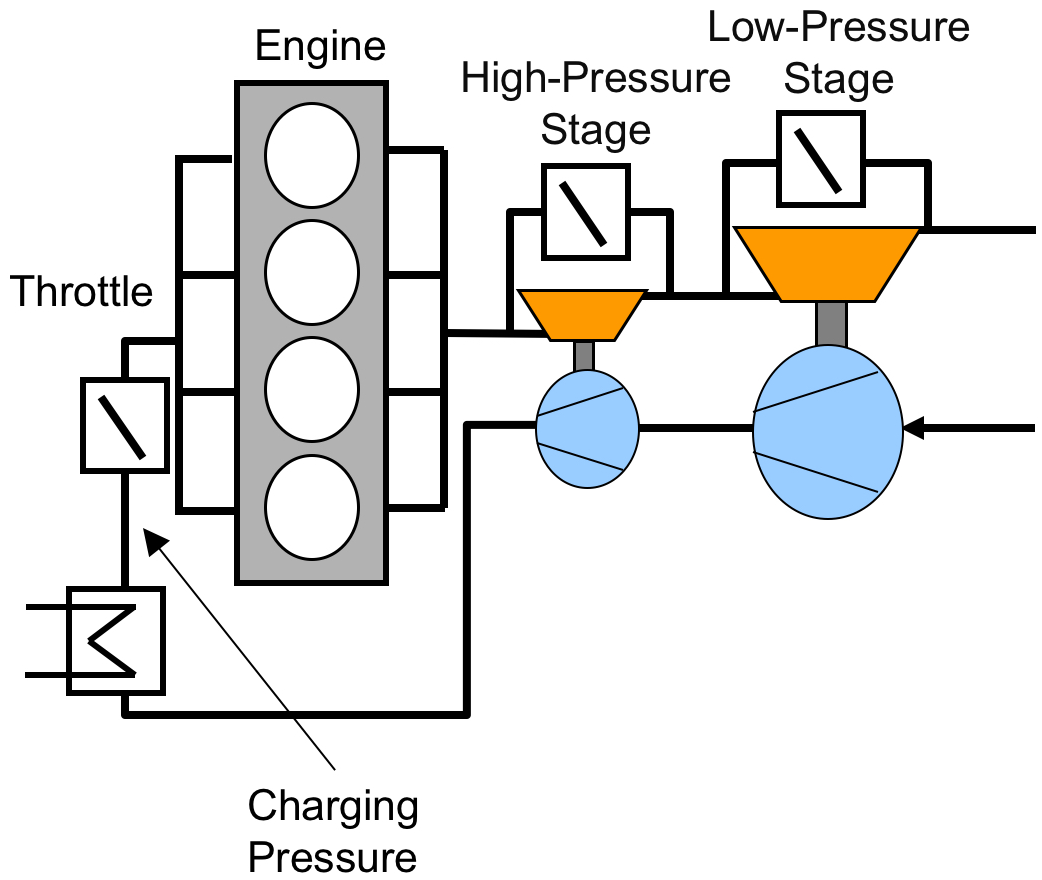
The figure shows a sketch of the control concept. The actuated variables are the wastegates of the high pressure and the low pressure stages, respectively. The only measured and controlled variable is the charging pressure. No sensors are available in the exhaust gas path.
Challenge
Increasingly complex air path structures like the two-stage turbocharging require advanced control algorithms to handle the arising requirements. To obtain the desired acceleration and exploit the dynamic capabilities of the air path architecture the controller has to track the charging pressure quickly and accurately. At the same time, the desired charging pressure has to be reached without overshoot. For gasoline engines these requirements are even more challenging as charging pressure directly influences torque due to the fixed air/fuel ratio.
Beside the requirements on control quality, the control algorithm has to take into account upper limits for the turbocharger speeds since violating these constraints can lead to serious damage of the whole engine. The limits have to be considered directly by the control algorithm because turbocharger speeds are typically not measured in a series production vehicle.
The severe control requirements have to be tackled despite the highly nonlinear system behavior. Simple linear control methods such as PID control are not able to handle the control objectives sufficiently. The chosen control methodology should be able to adapt to the changing system behavior depending on the operating point and still work efficiently and optimally.
A model-based control design is the natural solution to meet the high performance requirements of the two-stage turbocharger system. Nevertheless every system model will exhibit deviations from reality in different ways, fulfillment of these control requirements has to be ensured in system tests which necessitate iterative refinement of the controller tuning parameters. Hence, the chosen control strategy should allow for simple changes of the control parameters – ideally in closed-loop, i.e. while the engine is running.
Solution
To achieve the control objectives, a model-based optimal control design (MPC – Model Predictive Control) was chosen. Actuator constraints can naturally be taken into account in the problem description as well as constraints on the decision variables, as given by the turbocharger speed limits. Fast reference-tracking is achieved by choosing an appropriate quadratic control cost function that penalizes deviations from a given reference. The formulation results in a finite-time horizon optimal control problem, a specially structured decision making problem for which FORCESPRO by embotech is the ideal tool. The system dynamics are specified as parameters in ACADO, that uses FORCESPRO to solve the arising optimization problems in every sampling instance.
In an identical manner, the control objective parameters were defined as parameters to enable the design engineer to change the control objective during system operation. This allows for rapid prototyping of different controllers even with hardware in the loop because tuning parameters can be changed on the fly – without having to compile and deploy new code to the control hardware. The new tuning parameters are simply communicated to the control algorithm which immediately adapts its behavior. This is even done during test-drives by an engineer in the passenger seat, obtaining immediate feedback about the changing car dynamics from the experienced test-driver.
The algorithm implemented by FORCESPRO is highly efficient and exploits the available structure in the problem, without relinquishing optimality or constraint satisfaction. This means at every sampling instant the control system can make an optimal decision while observing limits on the actuators and on the system states such as turbocharger speed. Furthermore, because the generated solver is completely independent of external libraries it can easily be deployed to any embedded system for which a C compiler is available. To evaluate the real-time capabilities of the control strategy, the algorithm was deployed to a rapid control prototyping (RCP)-system where the average computation time for the generated solver was well below 10 ms. The test vehicle with prototyping equipment that was used for this project is shown in the picture below. Only sensors and actuators of a series production vehicle are used for control.


The challenging problem of controlling a two-stage turbocharged gasoline engine with a highly nonlinear model could be tackled very efficiently and successfully by using FORCESPRO to automatically obtain an implementation of the optimal control algorithm. The parametric capabilities of the optimal decision making algorithm generated by FORCESPRO not only allow control of highly nonlinear systems, but also make truly rapid prototyping possible. Both in simulation and during system operation the control parameters can be quickly adapted to immediately evaluate their impact on closed-loop behavior. Additionally, the same code that is generated by FORCES Pro for simulation of the control strategy can be downloaded to the target control hardware. System specific code optimizations are performed by FORCESPRO, alleviating the need for separate software development for simulation and deployment.
Results
- The optimal manipulated values calculated by FORCESPRO greatly improve the control performance compared to a linear controller, as given by a PID-controller. All requirements on the air path control can be fulfilled such that the full potential of the air path structure is used. This enables a highly dynamic transient performance (reducing the so-called ‘turbo-lag’) without overshoots and optimal steady state accuracy while at the same time respecting the limits on turbocharger speed.
- The parametric nature of the optimal decision making algorithms implemented by FORCESPRO enables the engineer to change design parameters during test-drives allowing for truly rapid prototyping with instant evaluation of the effect of different control strategies. This procedure allows to drastically reduce the time for calibration of the control algorithm. In this case the first satisfactory running control algorithm was realized after 3 hours spent in vehicle.
- From the given problem description, the control algorithm is generated and can be used without change for simulation, prototyping, and production. This alleviates the need for repetitive implementation of identical algorithms for different purposes and hardware platforms. One typical setting during design phase is the change of turbocharger sizing. This change can be directly incorporated in the process model of the optimization task allowing to quickly generate a new tailor-made control algorithm.
Acknowledgments
The initial control algorithms as well as the vehicle used for the experimental results was built up during the IGF research project 17733 N / 1 ’Prädiktive Steuerung für hochaufgeladene Ottomotoren’ of the FVV. Details about this project can be found in the final report: „Erweiterung des Motorsteuerungsmodells für Motoren mit Hochaufladung und Entwicklung von speziellen Dynamikfunktionen“, FVV Vorhaben 1153, 2015. The IGF project 17733 N / 1 of the research association Forschungskuratorium Maschinenbau e.V. – FKM. Lyoner Straße 18, 60528 Frankfurt am Main, was financially supported by the AiF within the framework of the development program for Industrial Community Research (IGF) of the Federal Ministry of Economic Affairs and Energy based on a decision of the German Bundestag. The authors like to thank the AiF, the FVV and the corresponding committee of the FVV for their financial support, expertise and discussions during the working group meetings.
Ongoing research concerns the development of nonlinear model-predictive control. Details about the used model, and simulation results for nonlinear model-predictive control can be found in the following publications:
T. Albin, D. Ritter, D. Abel, N. Liberda, R. Quirynen and M. Diehl, “Nonlinear MPC for a two-stage turbocharged gasoline engine airpath,” 2015 54th IEEE Conference on Decision and Control (CDC), Osaka, 2015, pp. 849-856. doi:10.1109/CDC.2015.7402335
T. Albin, D. Ritter, N. Liberda, S. Pischinger, D. Abel, “Two-Stage Turbocharged Gasoline Engines: Experimental Validation of Model-based Control”, IFAC-PapersOnLine, Volume 48, Issue 15, 2015, Pages 124-131. doi:10.1016/j.ifacol.2015.10.018